مشخصات کلی ربات طراحی شده
سنسور: دوربین استاندارد رزبری پای ( picamera )
بورد اصلی : رزبری پای 3 ( raspberry pi 3 )
زبان برنامه نویسی: python
کتابخانه: opencv3.2
توضیح کلی عملکرد ربات
در این پروژه یک ربات دنبال کننده خط ( Line Follower ) به کمک سخت افزار رزبری پای ( Raspberry pi 3 ) و با استفاده از دوربین پای ( PiCamera ) ساخته ایم که قادر است با الگوریتم های پردازش تصویر که به زبان Python نوشته شده است ، خطوط با رنگ دلخواه را تشخیص داده و آن را دنبال کند. شکل زیر ربات نهایی ساخته شده را نشان می دهد.

سخت افزار تشکیل دهنده ربات
سخت افزار ربات از بخش های مختلف زیر تشکیل شده است :
1- منبع تغذیه:
باتری های نصب شده بر روی بورد ، پاوربانک به عنوان منبع ذخیره ، آداپتور 12 ولت
2- بورد آماده رزبری پای 3 :
رزبری پای یک سیستم نهفته ( Embedded System ) می باشد که با هدف آموزشی توسط کشور انگلیس تولید وعرضه بازار شده است که با توجه به دسترسی آسان و قابلیت های بالا آن و همچنین فایل های آموزشی فراوان موجود در فضای مجازی جهت شروع و انجام پروژه ها گزینه مناسبی می باشد.
لینک خرید رزبری پای 3 از فروشگاه الکترو ولت
3- دوربین picamera

لینک خرید دوربین رزبری پای از فروشگاه الکترو ولت
4- بورد طراحی شده جهت درایو موتورها
5- 2 عدد موتور دی سی
6- شاسی ربات
بورد راه انداز طراحی شده
برد کمکی که جهت سهولت در چاپ (حتی به صورت دستی و در منزل) به صورت یک رو طراحی شده است.
قطعات مورد استفاده:
Lm2575 رگلاتور ولتاژ5 ولت 1 آمپر
L293d جهت درایو کردن موتورها
مقاومت متغیر جهت تنظیم سرعت موتورها
پین هدر 2*20 جهت اتصال مستقیم پین های رزبری پای به بورد
پین هدر ولتاژ ورودی و خروجی وled,capوled RGBو…
شماتیک :
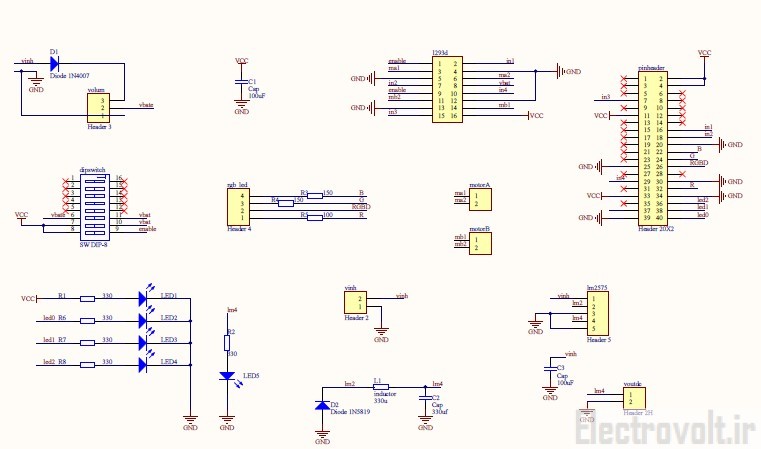
توضیحات شماتیک:
پین هدر 2*20 جهت اتصال مستقیم gpio های رزبری پای به بورد
هدر vinh جهت اتصال باتری یا آداپتور به برد
هدر voutdc خروجی 5 ولت 1 امپر ناشی از منبع vinh
Dip switch : پایه یک فعال ساز درایور می باشد. پایه دو وسه به ولتاژ ورودی موتورها متصل هستند (پایه2 5ولت دی سی وپایه3 ولتاژ متغیر که توسط مقاومت متغیر متصل بر روی بورد قابل تنظیم هست).
الگوریتم عملکرد ربات مسیر یاب
ابتدا تصویر ورودی از دوربین گرفته می شود. سپس با کمک توابع پردازش تصویر رنگ دلخواه مورد نظر ( در اینجا آبی ) استخراج می شود. سپس با کمک فیلتر فرکانس بالا نویز های موجود را حذف کرده و میزان حجمه رنگ را مشخص می کنیم سپس با کمک درایو کردن موتورها به طرف مرکز حجم محیط مشخص شده حرکت می کنیم.
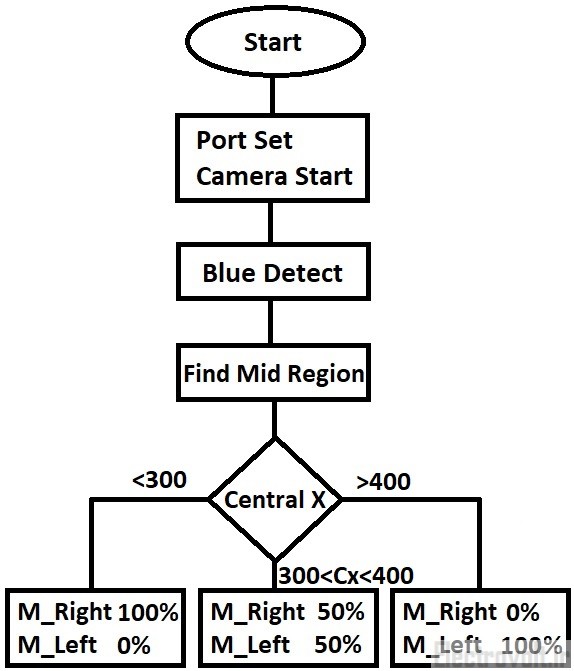
با توجه به فلوچارت این مراحل را باید انجام دهیم:
- تنظیم پورت ها
- فعال نمودن دوربین
- شروع بکار دوربین
- استخراج رنگ مورد نظر
- تعیین محل میانگین
- با توجه به ناحیه و میانگین سرعت موتورها کنترل می شوند.
فیلم عملکرد ربات :
این تنها معرفی کلی ربات تعقیب خط بود. برای دریافت توضیحات کامل و سورس پروژه به لینک زیر مراجعه کنید.
دیدگاهتان را بنویسید